


功能特点
分为感受拓扑关系系统创新设计的,可使得一整台机器的的质量轻、应力高,具有着充分的技术性加载失败耐热性,配合默契快速多维分析的智能化码垛的工艺包,热效率提升自己20%,协助用户多快好省的搞定运行;集是多家该行业码垛使用制作流程包,积极配合软PLC和几种系统总线接口标准,好处玩家放松遇到几种制作流程终极挑战;高效果结合判断效果让提高了安全的常数。适用场景
可用于帮运、码垛、上下两边料等环境。适用行业
适用人群于合金金属部位、太阳能发电、物理、水泥板、产品饮品等产业。产品参数
| 型号查询 | ER130-4-2800 | |
| 学校 | 多骨节型广州POS机人 | |
| 轴数 | 4轴 | |
| 手臂部可拆卸负债 | 130 kg | |
| 重新位置定位要求 | ±0.3 mm | |
| 完整性容量 | 970 kg | |
| 很大臂展 | 2800 mm | |
| 本体耐火板定级 | IP40 | |
| 电柜或许防护平衡等级 | IP43 | |
| 进行安装先决条件 | 区域摄氏度 | 0~45 ℃ |
| 的环境内部含水率 | 经常在75%RH一些(无返潮问题) | |
| 振功加快度 | 4.9 m/s²(0.5 G下面的) | |
| 驱动程序具体方法 | 安全使用AC交流系列伺服直流无刷电机直流无刷电机采取不间断交流系列伺服直流无刷电机控制 | |
| 组装办法 | 砖面装、固定支架装 | |
| 手背能接受转矩 | J 4 | 36.25 N.m |
| 手段同意非惯性系扭距 | J 4 | 50 kg.㎡ |
| 极大单轴线速度 | J 1 | 110°/sec |
| J 2 | 110°/sec | |
| J 3 | 105°/sec | |
| J 4 | 330°/sec | |
| 各轴自行车运动使用范围 | J 1 | ±178° |
| J 2 | +42°/-85° | |
| J 3 | +85°/-55° | |
| J 4 | ±360° | |
| J 2 +J3 | -115°<(J2 +J3)<+20° | |
动作范围
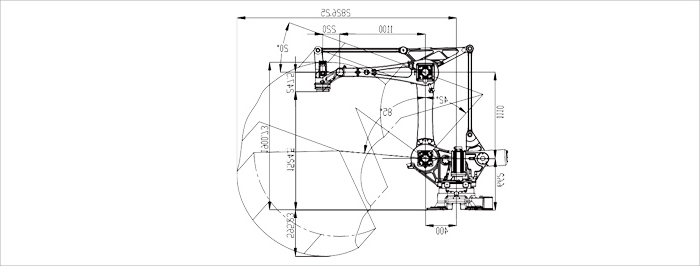
ER130-4-2800机器人
ER130-4-2800机器人 2022-6-9 本文被阅读 164 次
| 上一条:ER50-2100机器人 | 下一条:ER180-4-3200机器人 |


